哈喽,大家好,我是徐国晟,感谢英特尔老师的邀请,有机会适用哪吒开发板,本次系列文章从系统的烧录,环境配置,到算法开发,硬件调试,形成完成的使用指南,帮助大家更好的使用开发板。
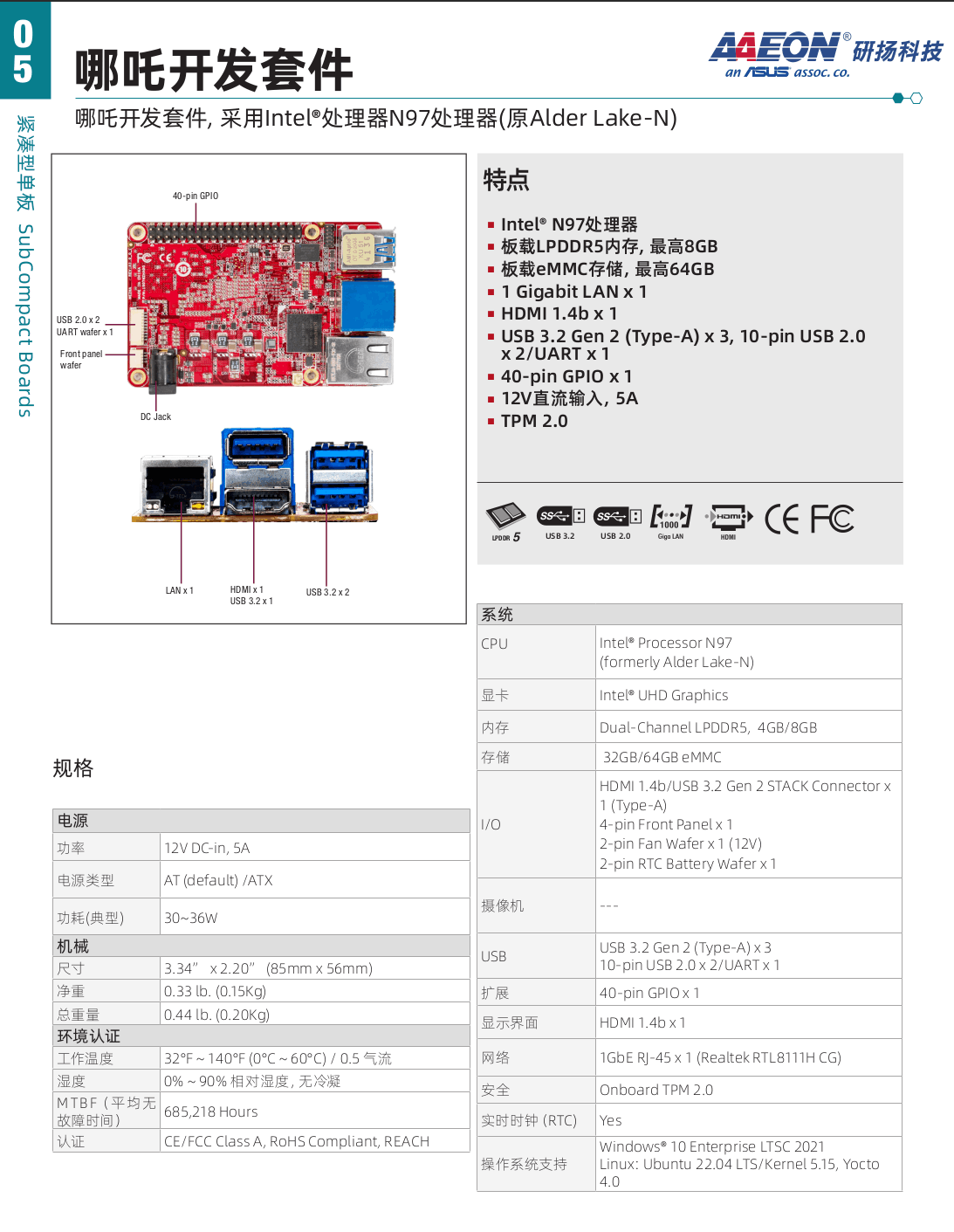
一、开箱体验+产品简介
开箱网上的内容非常多,就不一一介绍了,产品包装中规中矩,该有的配件都有,包括电源适配器,绿联的无线网卡等,在这些配件的加持下,正常使用是没有问题的。不过考虑到和机器人的结合,需要重新装一个ubuntu系统,并且配置一个12v的dc电源,用于机器人上的供电,更多细节内容会在接下来的文章中逐渐展开。
详细介绍
intel介绍页面:NeZha Developer Kit (intel.cn)
原生系统体验:
开机会出现哪吒的启动画面,红红火火,和哪吒的性格很像,有一种嫉恶如仇的感觉

稍等一分钟左右,我们就会进入系统中,由于显示器是4k屏,渲染压力比较大,功耗也比较高,这个时候摸起来会很烫。

下面是系统的基础参数,8b的内存,2g的主频,bios里面应该是可以超频的,考虑到散热,就没有调整
被动散热的金属片非常大,盖住了大半个开发板,好处是可以提供有效的防护,不好的一面是很重,放在机器人上,不好安装,同时供电也需要重新设计,稍微麻烦一些,不过不是大问题,通用的接口可以直接买到,最麻烦的还是功耗,提供了60w的适配器,有点担心电池扛不住,不过后面换了小点的12v/2a的适配器,工作也是正常的。
RTC模块,可以粘在u盘的侧壁,这样就不会来回晃动。

警告:适配器还是不要乱用,期间用了一个12.6v/2a的适配器,无法进入系统,让我误以为板卡烧了,各种检测,系统也烧录不进去,后来才定位到是适配器的原因,白白的折腾了一天的时间
二、系统烧录
系统的使用还是中规中矩,开发肯定不会基于win来做,还是要切换到ubuntu上

- 烧录的过程,和pc上的烧录基本一致,就不展开了,大家看图更直接


安装的时间差不多10min左右,大家等待烧录完成即可,烧录之后需要进行一次重启,记得拔掉启动盘。
三、基础环境配置
- 第一步更新一下系统,这块的时间比较久,22.04的系统到现在也两年了,中间的更新还是很多的
sudo apt update
sudo apt full-upgrade
主要是用于ssh远程和ip获取,这样我们就可以脱离桌面,直接开发了
xgs@xgs-UP-ADLN01:~$ sudo apt install openssh-server
[sudo] xgs 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
openssh-server 已经是最新版 (1:8.9p1-3ubuntu0.10)。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 3 个软件包未被升级。
xgs@xgs-UP-ADLN01:~$ sudo apt install net-tools
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
net-tools 已经是最新版 (1.60+git20181103.0eebece-1ubuntu5)。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 3 个软件包未被升级。
xgs@xgs-UP-ADLN01:~$
xgs@xgs-UP-ADLN01:~$ ifconfig
enp1s0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.3.66 netmask 255.255.255.0 broadcast 192.168.3.255
****
ether 00:07:32:b6:47:3c txqueuelen 1000 (以太网)
RX packets 38061 bytes 3079712 (3.0 MB)
RX errors 0 dropped 1661 overruns 0 frame 0
TX packets 1206 bytes 124882 (124.8 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (本地环回)
RX packets 444 bytes 49311 (49.3 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 444 bytes 49311 (49.3 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
xgs@xgs-UP-ADLN01:~$
- 这时候发现,无线网卡没有驱动,我们需要配置一下驱动,这样就不需要网线啦,供电就能用,会非常的方便
具体的网络驱动安装,我用的是另外一款网卡,可以参考这里,可以直接使用
https://github.com/morrownr/rtl8852bu
安装驱动之后,跑个测速,网速还是很赞的

下面就可以愉快的开发啦,还需要进行安装配置的有两块
- 机器人操作系统,ROS的安装,这里面我们直接使用鱼香ros的一键安装,稳定好用,不需要过多的操作,使用鱼香ros的安装方案,一方面是快,不需要fanqiang了,另一方面,可以把系统源直接替换成清华源,方便系统的更新。
wget http://fishros.com/install -O fishros && . fishros
- 算法框架的安装,配置openvino以及相关驱动,可以参考这里
- edge-developer-kit-reference-scripts/platforms/atom/adln at main · intel/edge-developer-kit-reference-scripts (github.com)
以上部分完成后,系统,环境搭建基本上就ready了,下一步就是开发的具体过程了,包括硬件的适配与联调,算法的应用与开发,后面会逐渐和大家分享,期待下一次的见面啦!








 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)