LabVIEW +YOLO11 在intel AIPC上完成目标检测(含CPU/GPU/NPU实测效果)
作者 :英特尔创新大使 王立奇
YOLO11是目标检测领域的最新进展,采用了可编程梯度信息(PGI)和广义高效层聚合网络(GELAN)等创新技术,显著提高了检测精度和计算效率。在此基础上,本文将使用 AI Vision Toolkit for OpenVINO™ for LabVIEW(以下简称AIVT-OV),在 intel AIPC 设备上部署YOLO11模型,并实现实时目标检测。
一、前言
1.1 intel AIPC简介
超薄超轻,手掌大小,接口丰富,满足多种外部设备连接需求。搭载更快的英特尔® 酷睿Ultra 7-155H 处理器,全新的三合一架构(CPU、GPU、NPU),是一款高性能迷你工作站,配备了以下硬件组件:
- 处理器(CPU):英特尔® 酷睿Ultra 7-155H 处理器,提供卓越的计算性能。
- 内存(RAM):板载 32GB LPDDR5 内存,确保多任务处理和高负载应用的流畅运行。
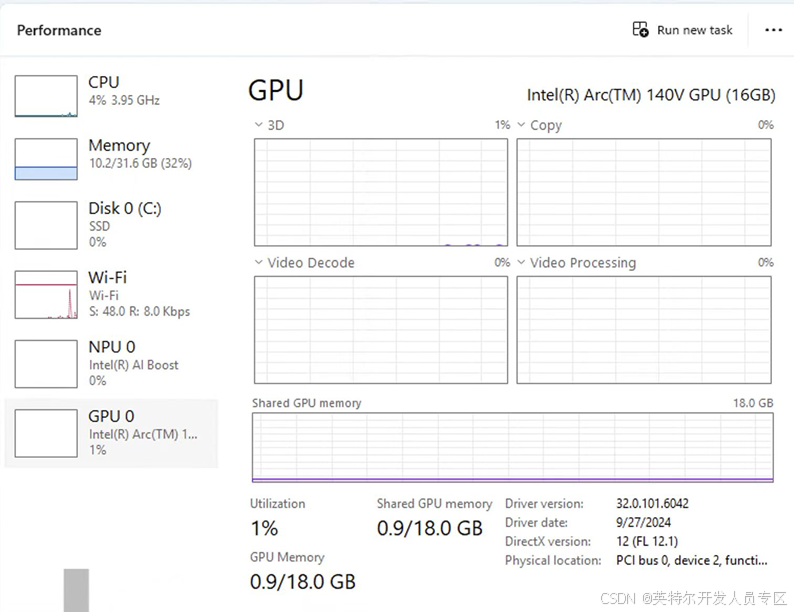
- GPU:内置英特尔® Arc™ 显卡,支持高质量的图形渲染和视频处理。
- NPU:集成英特尔® AI Boost NPU,为 AI 应用提供硬件加速,三重 AI “芯”引擎,算力高达 34 TOPS,提升 AI 任务的处理效率。



1.2 AI Vision Toolkit for OpenVINO™ for LabVIEW简介
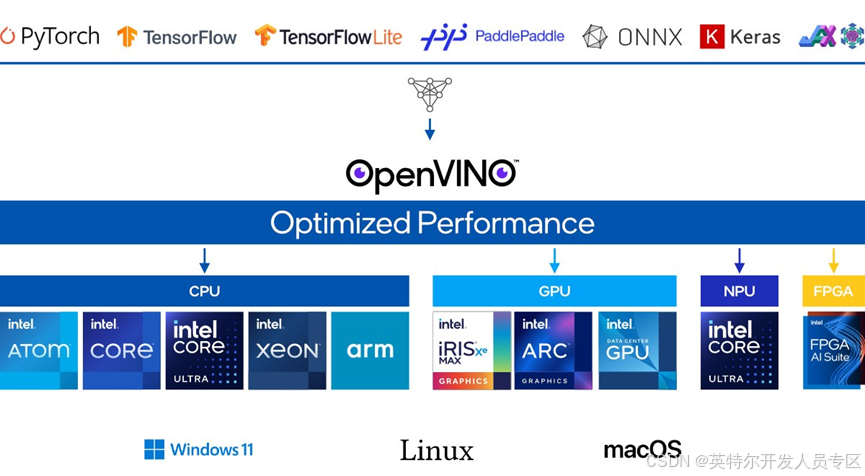
AI Vision Toolkit for OpenVINO for LabVIEW(以下简称AIVT-OV),由 VIRobotics 专为LabVIEW开发的独立工具包,旨在充分利用OpenVINO™的深度学习和计算机视觉优化功能。帮助LabVIEW用户优化和加速在各种英特尔架构(如CPU、GPU和NPU)上的深度学习模型推理。例如生成AI,视频,音频和语言,以及来自Pytorch,Tensorflow,tensorflow,onnx等流行框架的模型。并提供集成化的API,使开发者能够快速在LabVIEW中构建、配置和部署图像处理、视觉识别、生成AI以及语言等应用中的深度学习模型,加速应用落地。
通过该工具包,用户能够轻松地将YOLO11等深度学习模型与LabVIEW进行集成,从而实现高效的实时目标检测,并在Intel®硬件(如CPU、GPU、NPU)上加速推理任务,提升性能。
1.3 YOLO11简介
YOLO11是Ultralytics团队开发的YOLO(You Only Look Once)系列实时物体检测器的最新版本,采用改进的主干和颈部架构,显著增强了特征提取能力,以实现更精确的目标检测和复杂任务性能。引入了精致的架构设计和优化的训练管道,提供更快的处理速度,并保持准确性和性能之间的最佳平衡。随着模型设计的进步,YOLO11m在COCO数据集上实现了更高的平均精度(mAP),同时使用的参数比YOLOv8m少22%,在不影响精度的情况下提高了计算效率。YOLO11可以无缝部署在各种环境中,包括边缘设备、云平台以及支持NVIDIA GPU的系统,确保了最大的灵活性。无论是对象检测、实例分割、图像分类、姿态估计还是定向对象检测(OBB),YOLO11都能应对各种计算机视觉挑战。
YOLOv11官方开源地址:https://github.com/ultralytics/ultralytics
二、环境搭建
2.1 部署本项目所需环境
- 操作系统:> = Windows 10(64位)
- LabVIEW: >= 2018 (64-Bit)。
- AIVT-OV:>=virobotics_lib_ai_vision_toolkit_for_openvino-1.0.0.64.vip
2.2 软件下载与安装
- 参考官方指南进行安装,确保所有依赖项正确配置。
三、AIPC上部署YOLO11模型
3.1 快速打开范例
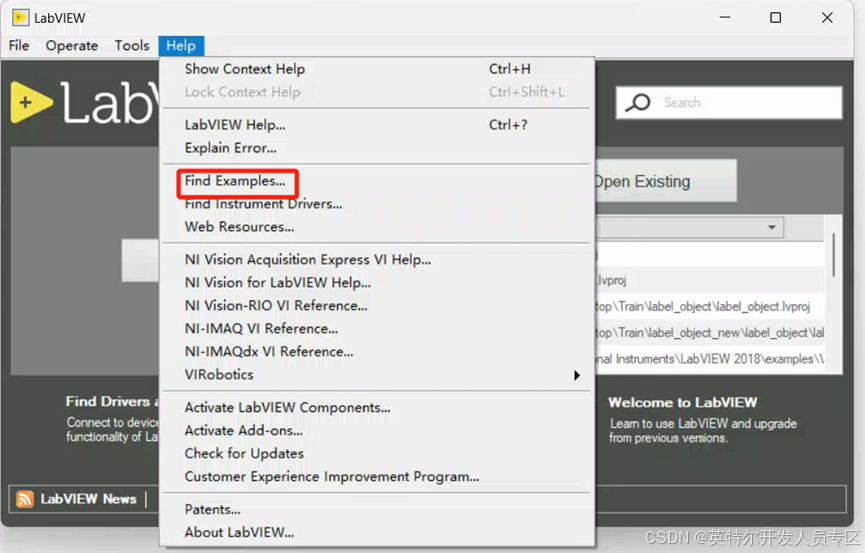
1. 双击打开LabVIEW,在“Help”选项下找到“Find Examples…”单击打开。
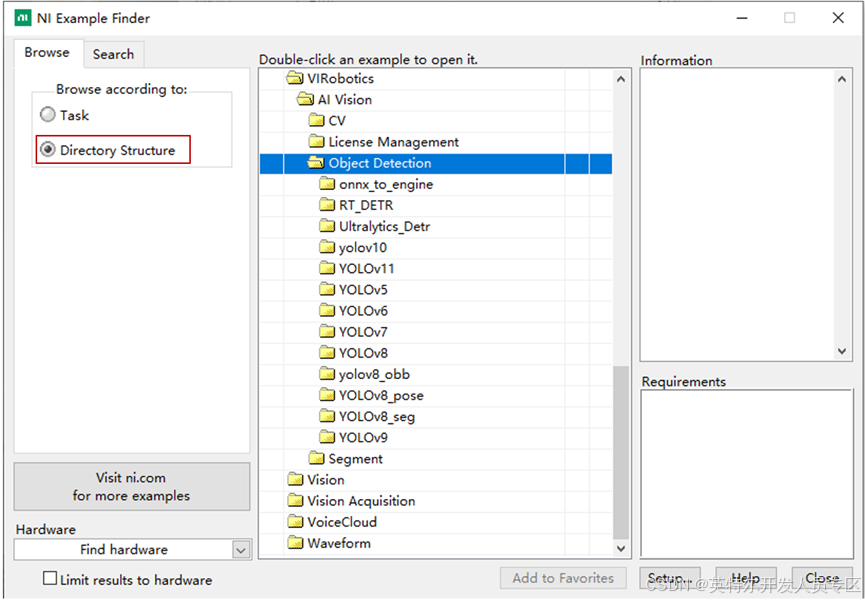
2. 打开范例查找器,选择Directory Structure–VIRobotics -AI Vision–Object Detection即可获取所有目标检测的范例。不同模型的范例,放到了不同文件夹下。
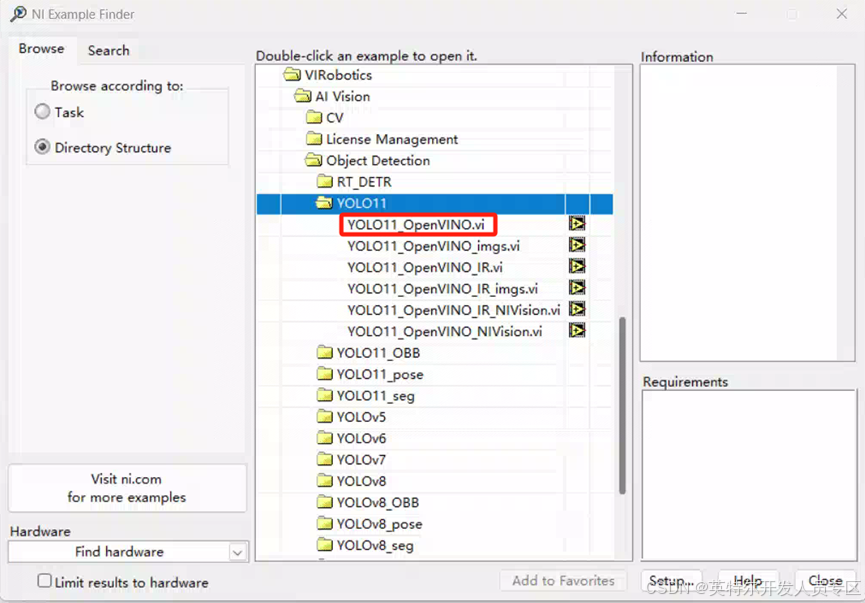
3. 双击“YOLOv11”范例文件夹,双击YOLO11_OpenVINO.vi
3.2 运行代码
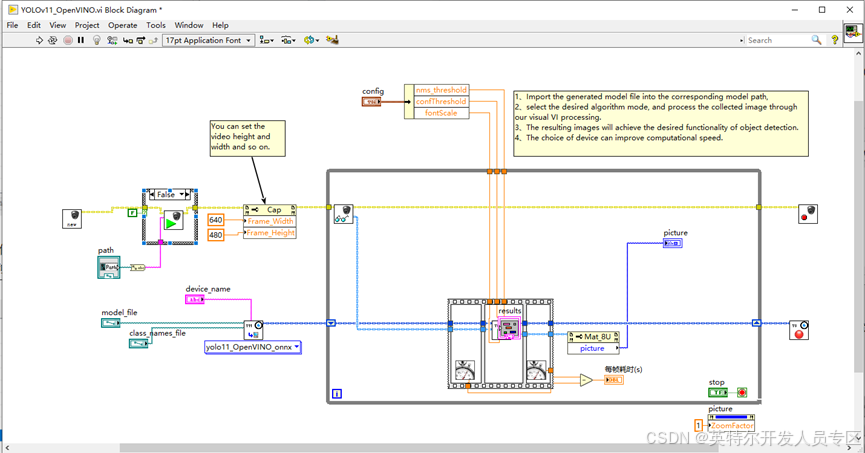
1.完成环境搭建并加载模型后,运行 YOLOv11_OpenVINO.vi,代码如下:
3.3 实测效果
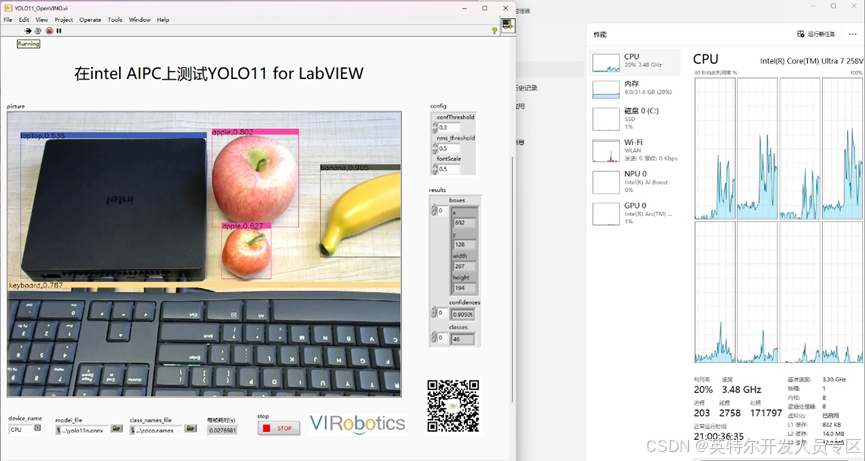
本次用于实时图像采集的摄像头分辨率为1080p, 采样速率为30FPS,使用模型为yolo11n.onnx,模型输入为640*640。

1.在CPU上实测效果
完成目标检测过程,单路相机识别每帧图像27ms左右。CPU在目标检测过程中有一定的负载波动,尤其在处理较为复杂的图像时,CPU负载有所上升。
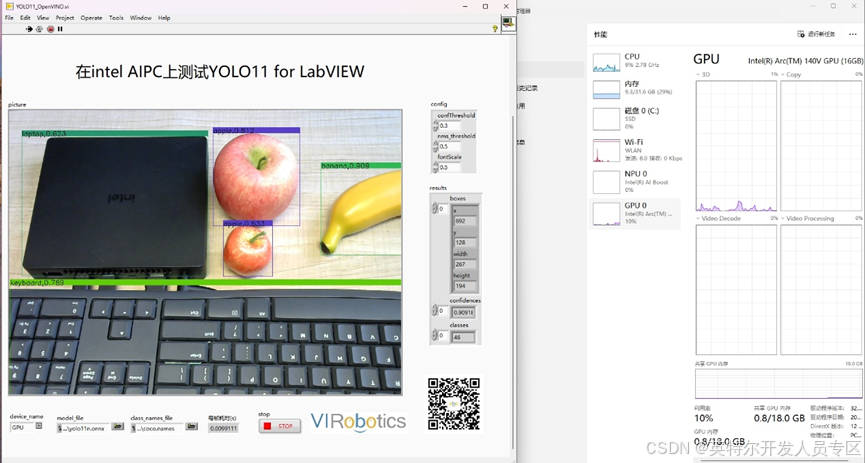
2.在GPU上实测效果
完成目标检测过程,单路相机识别每帧图像9ms左右,GPU有明显加速推理的效果。
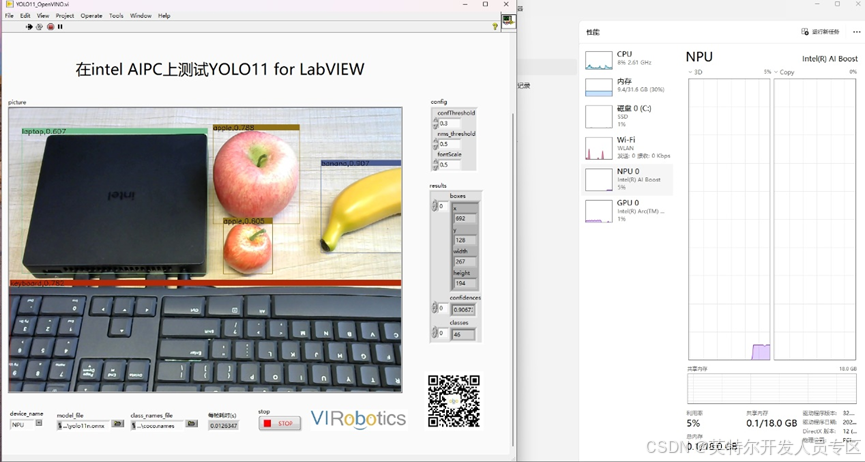
3.在NPU上实测效果
完成目标检测过程,单路相机识别每帧图像12ms左右,因没有针对NPU进行模型的优化,所有NPU利用情况相对较低,使用优化之后的IR模型,速度应该会更快。
联系我们
如有任何问题或需求帮助,可以通过以下方式联系我们:
官网: 仪酷智能
微信公众号:仪酷智能科技
B站:仪酷智能
总结
本次项目成功地展示了YOLO11在Intel AIPC设备上的目标检测效果,通过硬件加速的应用,提升了检测效率,特别是在GPU和NPU的加速下,进一步证明了硬件加速对实时视觉任务的重要性,希望本次测试能够为开发者提供有价值的参考
为开发者提供丰富的英特尔开发套件资源、创新技术、解决方案与行业活动。欢迎关注!
更多推荐



 18
18 0
0- 0



 已为社区贡献326条内容
已为社区贡献326条内容

所有评论(0)